[MOOC]分析linux system_call中断处理过程
更新日期:
- 周立维 原创作品转载请注明出处
- 《Linux内核分析》MOOC课程http://mooc.study.163.com/course/USTC-1000029000
系统调用 getpid
选用的系统调用为getpid,调用号为20 (/linux-3.18.6/arch/x86/syscalls/syscall_32.tbl):
20 i386 getpid sys_getpid
添加 MenuOS 菜单
在 menu/test.c 中添加如下两个函数: GetPid()是直接调用库函数, 而GetPidAsm()是用汇编方式实现。
|
|
同时在main()中添加新的菜单项。
|
|
再 gcc 编译, 生成新的 rootfs.img, 启动 qemu。
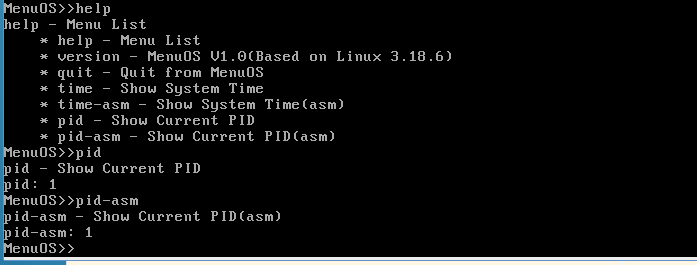
如下是运行截图:
system_call 流程分析
在test.c中定义的GetPidAsm直接使用汇编指令int $0x80来进行系统调用: 先将getpid的系统调用号0x14放入%eax, int $0x80指令之后将返回值从%eax 放回 pid, 最后打印出来。
int $0x80 触发软件中断, 代码进入到中断处理函数 system_call 中, 即为系统调用处理函数。 system_call 的对应的中断在如下文件中设置:
/linux-3.18.6/init/main.c asmlinkage __visible void __init start_kernel(void) 561 trap_init(); /linux-3.18.6/arch/x86/kernel/traps.c void __init trap_init(void) 838 #ifdef CONFIG_X86_32 839 set_system_trap_gate(SYSCALL_VECTOR, &system_call); 840 set_bit(SYSCALL_VECTOR, used_vectors); 841 #endif /linux-3.18.6/arch/x86/include/asm/irq_vectors.h 50 #ifdef CONFIG_X86_32 51 # define SYSCALL_VECTOR 0x80 52 #endif
再来看看 system_call 的定义, 中间删除了两段由宏 #ifdef CONFIG_X86_ESPFIX32 包围的代码:
/linux-3.18.6/arch/x86/kernel/entry_32.S 489 # system call handler stub 490 ENTRY(system_call) 491 RING0_INT_FRAME # can't unwind into user space anyway 492 ASM_CLAC 493 pushl_cfi %eax # save orig_eax 494 SAVE_ALL 495 GET_THREAD_INFO(%ebp) 496 # system call tracing in operation / emulation 497 testl $_TIF_WORK_SYSCALL_ENTRY,TI_flags(%ebp) 498 jnz syscall_trace_entry 499 cmpl $(NR_syscalls), %eax 500 jae syscall_badsys 501 syscall_call: 502 call *sys_call_table(,%eax,4) 503 syscall_after_call: 504 movl %eax,PT_EAX(%esp) # store the return value 505 syscall_exit: 506 LOCKDEP_SYS_EXIT 507 DISABLE_INTERRUPTS(CLBR_ANY) # make sure we don't miss an interrupt 508 # setting need_resched or sigpending 509 # between sampling and the iret 510 TRACE_IRQS_OFF 511 movl TI_flags(%ebp), %ecx 512 testl $_TIF_ALLWORK_MASK, %ecx # current->work 513 jne syscall_exit_work 514 515 restore_all: 516 TRACE_IRQS_IRET 517 restore_all_notrace: ... 530 restore_nocheck: 531 RESTORE_REGS 4 # skip orig_eax/error_code 532 irq_return: 533 INTERRUPT_RETURN 534 .section .fixup,"ax" 535 ENTRY(iret_exc) 536 pushl $0 # no error code 537 pushl $do_iret_error 538 jmp error_code 539 .previous 540 _ASM_EXTABLE(irq_return,iret_exc) 541 ... 587 CFI_ENDPROC 588 ENDPROC(system_call) /linux-3.18.6/arch/x86/include/asm/irqflags.h 145 #define INTERRUPT_RETURN iret
- 493-494 先将
%eax和其它寄存器入栈 (SAVE_ALL), 495-498 根据是根据当前线程状态来决定是否调用syscall_trace_entry吧? (不确定根据哪些状态位) - 499-500 如果系统调用号大于最大调用号
NR_syscalls, 则转入syscall_badsys, 设置异常返回值于%eax中 - 501-502 调用对应的系统调用函数。
sys_call_table是起始地址, 由%eax中的调用号来确定调用函数的偏移量 - 503~ 之后就开始准备返回了,512-513 会对中断信号进行处理
- 530-531
RESTORE_REGS 4从栈中恢复寄存器的值 - 532-533 宏
INTERRUPT_RETURN定义了返回指令 `iret
总结
系统调用的大致过程如下:
- 中断
int $0x80触发系统调用,%eax传递系统调用过 - 中断处理函数
system_call先将寄存器的值入栈,先检查中断号, 再调用由sys_开始的系统函数, 最后从栈恢复寄存器,iret指令返回 - 系统调用结果由
%eax传回